我的智能小车(五)——终结篇
项目总结
时隔整整八个月,终于想起要把最终的成果放上来,其实这个东西已经完成很久了,久到我自己都快要忘记我曾经花费了很多时间在这个项目上,最后我只想把最终的作品放上来,其实我还有很多预想的功能还没有完成,但是由于种种原因,我没有继续做下去,这也算是一个半成品吧。
最终程序
完整的 Arduino 代码如下:
/*
* 智能小车完整控制程序
* 包含电机驱动、测速及蓝牙控制功能
*/
// 测速模块
int SpeedNumLeft = 12; // 连接到 pin 12
int SpeedNmuRight = 13; // 连接到 pin 13
// 左轮驱动
int MotorLeftPinA = 2;
int MotorLeftPinB = 4;
int MotorLeftEn = 3;
// 右轮驱动
int MotorRightPinA = 7;
int MotorRightPinB = 8;
int MotorRightEn = 6;
int Motor;
int Speed = 100; // 初始速度值
int dir;
int i;
int j;
int x;
int y;
int val; // 存储蓝牙接收的指令
int n = 0; // 左轮码盘读数(即状态跳变次数)
int m = 0; // 右轮码盘读数(即状态跳变次数)
int flagL = 0; // 左轮初始状态标志
int flagR = 0; // 右轮初始状态标志
void setup()
{
Serial.begin(9600); // 初始化串口通信,用于蓝牙控制
// 初始化左轮控制引脚
pinMode(MotorLeftPinA, OUTPUT);
pinMode(MotorLeftPinB, OUTPUT);
pinMode(MotorLeftEn, OUTPUT);
// 初始化右轮控制引脚
pinMode(MotorRightPinA, OUTPUT);
pinMode(MotorRightPinB, OUTPUT);
pinMode(MotorRightEn, OUTPUT);
// 初始化测速模块引脚
pinMode(SpeedNumLeft, INPUT);
pinMode(SpeedNmuRight, INPUT);
}
/**
* 电机驱动函数
* @param motor 电机选择,'L'为左轮,'R'为右轮
* @param speed 速度值 (0-255)
* @param dir 方向,1 为正转,0 为反转
*/
void MOTORDRIVE(char motor, int speed, int dir)
{
if(motor == 'L')
{
analogWrite(MotorLeftEn, speed);
if(dir == 1)
{
digitalWrite(MotorLeftPinA, HIGH);
digitalWrite(MotorLeftPinB, LOW);
}
else
{
digitalWrite(MotorLeftPinA, LOW);
digitalWrite(MotorLeftPinB, HIGH);
}
}
if(motor == 'R')
{
analogWrite(MotorRightEn, speed);
if (dir == 1)
{
digitalWrite(MotorRightPinA, HIGH);
digitalWrite(MotorRightPinB, LOW);
}
else
{
digitalWrite(MotorRightPinA, LOW);
digitalWrite(MotorRightPinB, HIGH);
}
}
}
/**
* 码盘读数函数
* @param motor 电机选择,'L'为左轮,'R'为右轮
*/
void SpeedNum(char motor)
{
if(motor == 'L')
{
i = digitalRead(SpeedNumLeft); // 读取码盘状态(0 或 1)
if(!flagL){ // 获取初始状态读数
j = i;
flagL = 1;
}
if(i != j){ // 每次状态发生跳变的时候,读数增加 1
n += 1;
j = i;
Serial.print("Left:");
Serial.println(n);
Serial.print("Speed:");
Serial.println(Speed);
}
}
if(motor == 'R')
{
x = digitalRead(SpeedNmuRight); // 读取码盘状态(0 或 1)
if(!flagR){ // 获取初始状态读数
y = x;
flagR = 1;
}
if(x != y){ // 每次状态发生跳变的时候,读数增加 1
m += 1;
y = x;
Serial.print("Right:");
Serial.println(m);
Serial.print("Speed:");
Serial.println(Speed);
}
}
}
// 前进函数
void Forward()
{
MOTORDRIVE('R', Speed, 1);
MOTORDRIVE('L', Speed, 1);
}
// 后退函数
void Backward()
{
MOTORDRIVE('R', 100, 0);
MOTORDRIVE('L', 100, 0);
}
// 停止函数
void Stop()
{
MOTORDRIVE('R', 0, 1);
MOTORDRIVE('L', 0, 1);
}
// 右转函数
void RTurn()
{
Stop();
MOTORDRIVE('L', 100, 1);
}
// 左转函数
void LTurn()
{
Stop();
MOTORDRIVE('R', 100, 1);
}
// 加速函数
void SpeedUp()
{
Speed += 10;
}
// 减速函数
void SpeedDown()
{
Speed -= 10;
}
void loop()
{
// 持续读取码盘数据
SpeedNum('R');
SpeedNum('L');
// 检查是否有蓝牙数据
if(Serial.available())
{
val = Serial.read();
if(val == 'f'){
Forward(); // 前进
}
if(val == 's'){
Stop(); // 停止
}
if(val == 'b')
{
Backward(); // 后退
}
if(val == 'l')
{
LTurn(); // 左转
}
if(val == 'r')
{
RTurn(); // 右转
}
if(val == 'o')
{
SpeedUp(); // 加速
}
if(val == 'p')
{
SpeedDown(); // 减速
}
}
}
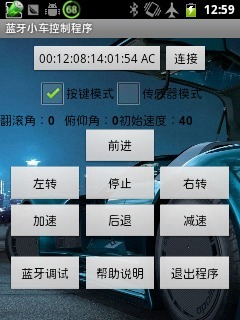
控制应用界面
为了方便控制小车,我开发了一个 Android 手机应用,通过蓝牙与小车连接并进行远程控制。
演示视频
下面是智能小车的操作演示视频:
相关资源下载
以下是项目相关文件的下载地址:
项目反思
虽然这个智能小车项目只是一个半成品,但通过它我学习了很多关于 Arduino 编程、电机驱动控制、Android 应用开发以及蓝牙通信的知识。未来如果有机会,我希望能够继续完善以下功能:
- 添加更多传感器(如超声波)实现避障功能
- 优化速度控制算法,实现更平稳的行驶
- 增加自动巡线功能
- 扩展手机应用的控制功能